DexDeform: Dexterous Deformable Object Manipulation with Human Demonstrations and Differentiable Physics
Abstract
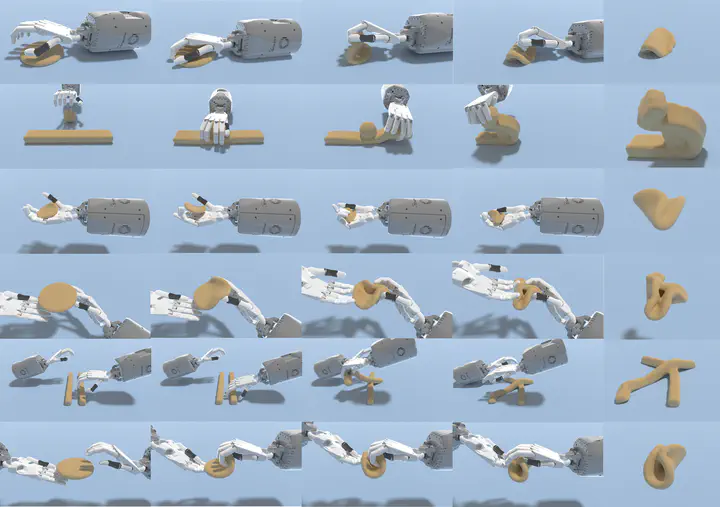
In this work, we aim to learn dexterous manipulation of deformable objects using multi-fingered hands. Reinforcement learning approaches for dexterous rigid object manipulation would struggle in this setting due to the complexity of physics interaction with deformable objects. At the same time, previous trajectory optimization approaches with differentiable physics for deformable manipulation would suffer from local optima caused by the explosion of contact modes from hand-object interactions. To address these challenges, we propose DexDeform, a principled framework that abstracts dexterous manipulation skills from human demonstration, and refines the learned skills with differentiable physics. Concretely, we first collect a small set of human demonstrations using teleoperation. And we then train a skill model using demonstrations for planning over action abstractions in imagination. To explore the goal space, we further apply augmentations to the existing deformable shapes in demonstrations and use a gradient optimizer to refine the actions planned by the skill model. Finally, we adopt the refined trajectories as new demonstrations for finetuning the skill model. To evaluate the effectiveness of our approach, we introduce a suite of six challenging dexterous deformable object manipulation tasks. Compared with baselines, DexDeform is able to better explore and generalize across novel goals unseen in the initial human demonstrations.
S. Lester Li
李思哲
I am interested in building inverse models that learn to caputure the rich and structured representation of our world from unstructured observation, through physical interactions of embodied agents. To this end, my research draws ideas from vision, graphics, robotics, and computational cognitive science.