Contact Points Discovery for Soft-Body Manipulations with Differentiable Physics
Abstract
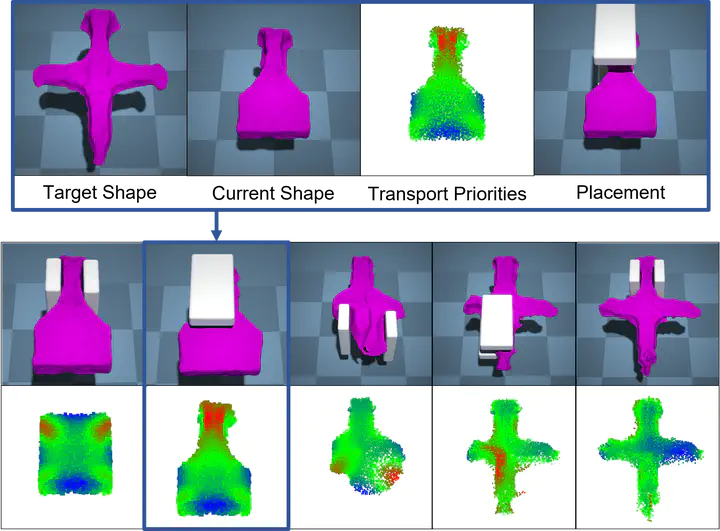
Differentiable physics solver often gets stuck when the initial contact points of the end effectors are sub-optimal or when performing multi-stage tasks that require contact point switching, which often leads to many local minima. To address this challenge, we propose a contact point discovery approach (CPDeform) that guides the stand-alone differentiable physics solver to deform various soft-body plasticines.
Dataset Illustration
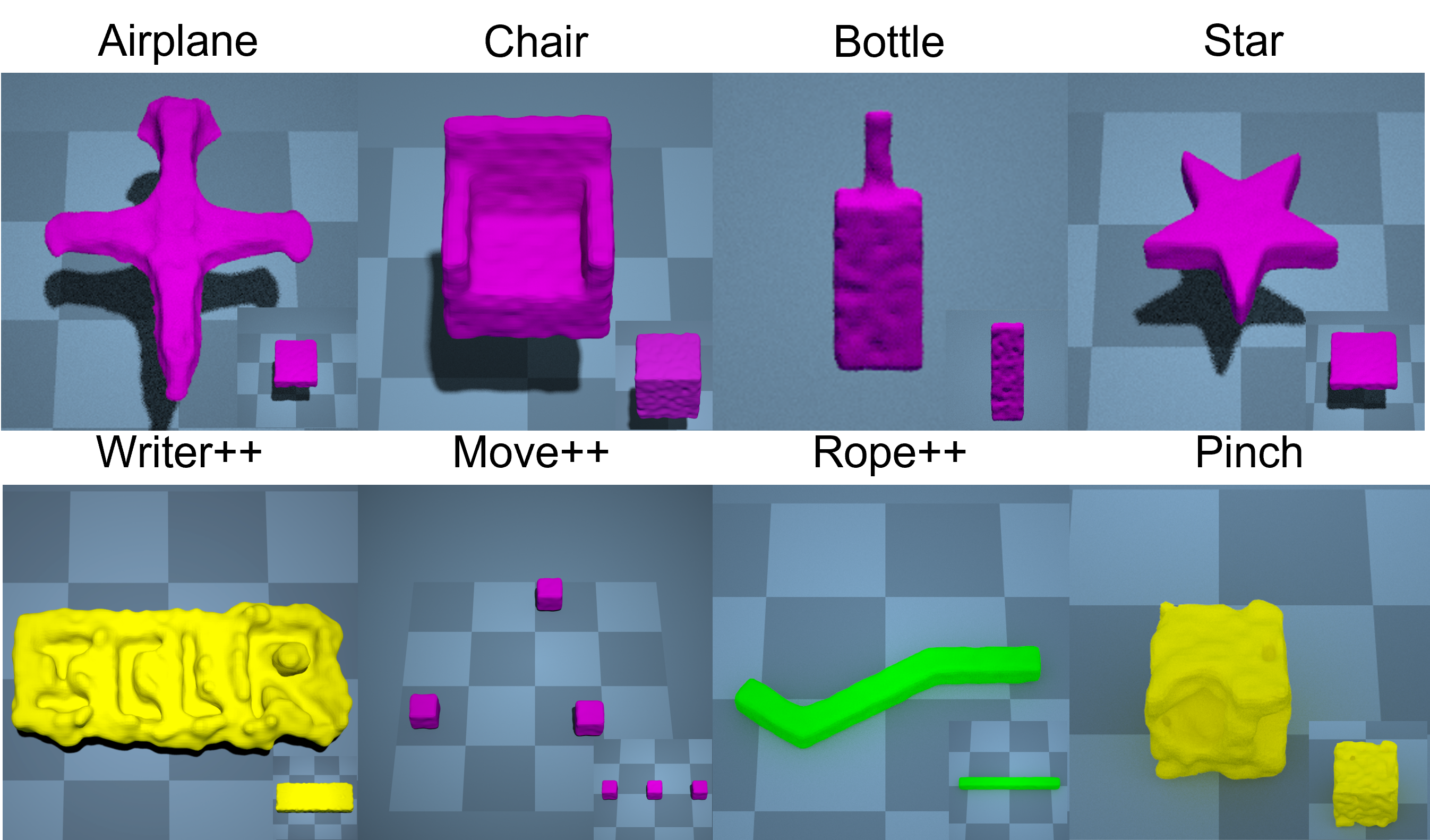
Airplane
Chair
Writer
Move++
Rope++
Code Release
Please check out our GitHub repository CPDeform.
Citation
@InProceedings{li2022contact,
author = {Li, Sizhe and Huang, Zhiao and Du, Tao and Su, Hao and Tenenbaum, Joshua and Gan, Chuang},
title = {{C}ontact {P}oints {D}iscovery for {S}oft-{B}ody {M}anipulations with {D}ifferentiable {P}hysics},
booktitle = {International Conference on Learning Representations (ICLR)},
year = {2022}}
Acknowledgement
We thank Hannah Skye Dunnigan for her help on graphic design. This work was supported by MIT-IBM Watson AI Lab and its member company Nexplore, ONR MURI (N00014-13-1-0333), DARPA Machine Common Sense program, ONR (N00014-18-1-2847) and MERL.
S. Lester Li
李思哲
I am interested in building inverse models that learn to caputure the rich and structured representation of our world from unstructured observation, through physical interactions of embodied agents. To this end, my research draws ideas from vision, graphics, robotics, and computational cognitive science.